
An iterative algorithmic UAV path optimization process for Structure-for-Motion modelling
Abstract
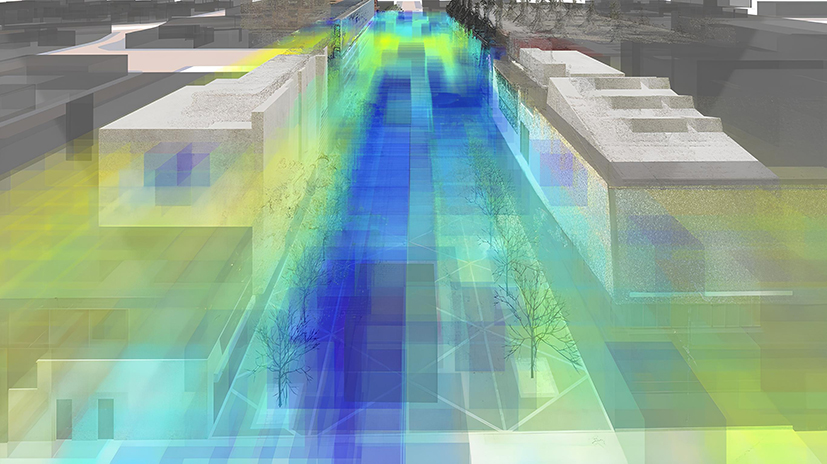
The use of unmanned aerial vehicles (UAVs) for 3D reconstruction through photogrammetry has gained significant attention in recent years. With the advancement of technology and the availability of affordable drones with high-resolution cameras, capturing aerial images for creating detailed 3D models has become more accessible, however, UAV survey flight planning still presents challenges. The planning stage is essential in aerial photogrammetry as it sets the foundation for efficient and accurate surveying. Proper predictive planning ensures a smooth workflow on site, generating high-quality datasets for reconstruction while minimizing the need for repeat surveys. This approach not only reduces costs but also mitigates potential errors and delays during the survey process.
Within the presented frame of reference, the present study explores the use of UAVs for 3D reconstruction through photogrammetry, focusing on optimizing flight paths and view planning. It addresses challenges such as safety, navigation, and image dataset optimization. The study presents the current advancement of custom parametric workflow developed in Rhino/Grasshopper. The workflow is targeted for average users, aiming to simplify the process and integrate it with architectural and planning workflows. The approach involves four algorithms, including proxy model generation, visibility analysis, path generation, and camera position estimation. The iterative process enhances precision through progressive refinement of the proxy model, offering potential for predictive modelling and effective photogrammetry utilization in UAV planning. Further research and testing are needed to validate real-world performance.
DOI: https://doi.org/10.20365/disegnarecon.30.2023.22
Keywords
Full Text:
PDFRefbacks
- There are currently no refbacks.
Copyright (c) 2023 Lorenzo Ceccon, Matteo Cavaglià
DISEGNARECON
ISSN 1828 5961
Registration at L'Aquila Law Court no 3/15 on 29th June, 2015.
Indexed in SCOPUS. Diamond Open Access. All papers are subjected to double blind peer review process by qualified reviewers.
Journal founded by Roberto Mingucci